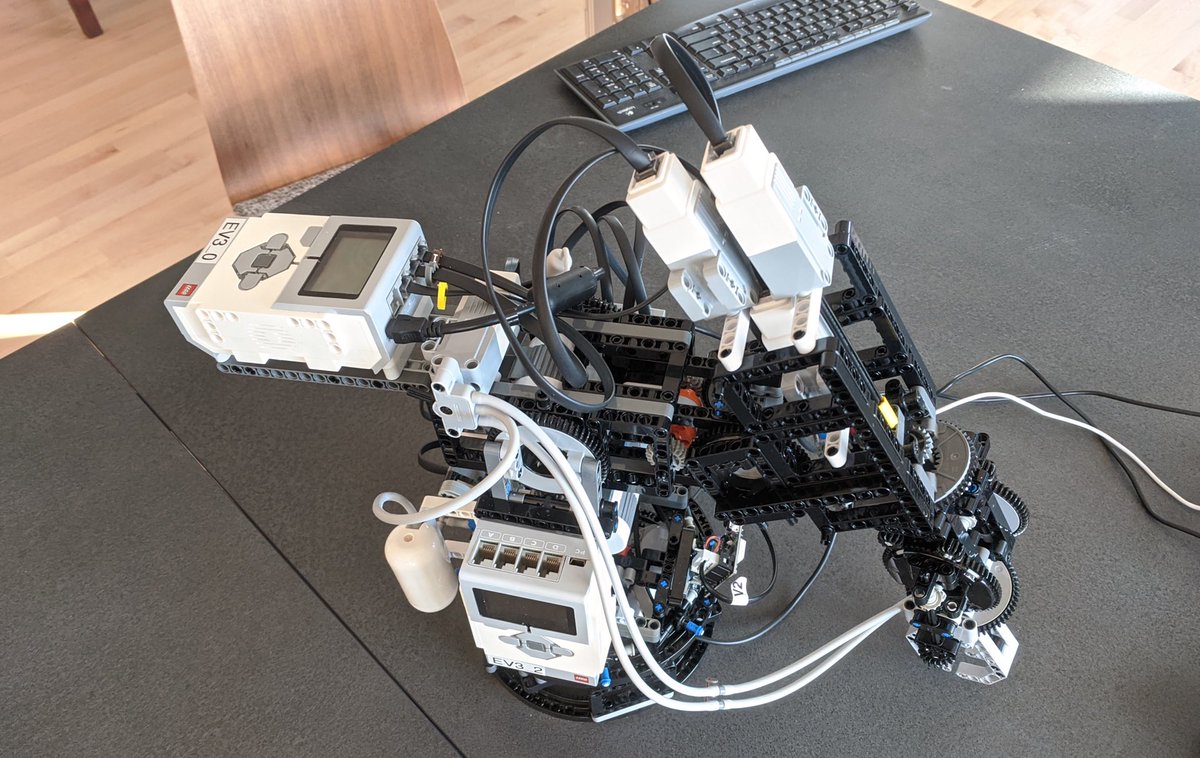
Spent way too much time working on the robotic arm I’m building. Currently it has 8 servo motors, 3 microcomputers, pneumatics, and machine vision. The main challenges, now, are software engineering and redesigning subassemblies as I learn more. Then, I’ll take it all apart.